MEMS Pull-in and Lift-off Simulation Using Continuation Methods
- Category: MEMS & BioMEMS
- Tags: luca daniel, zheng zhang
The voltages at which MEMS actuators and sensors become unstable, known as pull-in and lift-off voltages, are critical parameters for almost any design. However, current general-purpose simulators compute these critical parameters by directly sweeping the voltage, leading to either excessively large computational cost or convergence failure near the instabilities. This work applies two kinds of continuation methods to simulate the pull-in and lift-off effects.
The first algorithm uses arc-length continuation algorithm to compute the multiple static solutions of a given MEMS design. Using a tangent predictor and a correction scheme, a next solution point can be calculated based on the previous solution point. This method can efficiently avoid the convergence failures of Newton iterations when a direct sweeping method is applied to solve for the static solutions[1].
The second algorithm uses a different idea to generate a single-solution curve. The basic idea is that we first apply arc-length continuation until a pull-in or lift-off point is approaching. After that, a homotopy method is applied to directly solve for the next point after a sharp transition of the solution curve.
Both algorithms have been implemented in a commercial MEMS+IC co-design software package, and they have been tested by various industrial MEMS design cases. Figures 1 and 2 show that the simulation results from both algorithms are the same. These results are consistent with that from a commercial simulator, CoventorWare, which utilizes detailed but time-consuming finite-element and boundary-element analysis.
-
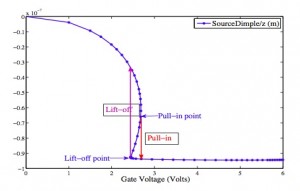
- Figure 1: Simulation results of the first kind of continuation algorithm. The pull-in and lift-off voltages are 2.68 V and 2.44 V, respectively.
-
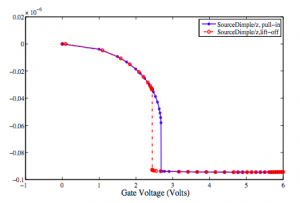
- Figure 2: Simulation results of the second kind of continuation results. The blue curve shows that pull-in happens at 2.683V; the red curve shows that lift-off happens at 2.442 V.
- Z. Zhang, M. Kamon and L. Daniel, “Continuation-based pull-in and lift-off simulation algorithms for Micro-Electro-Mechanical Devices,” IEEE Journal of Microelectromechanical Systems, submitted. [↩]