Development of Porous Piezoresistive Materials and Its Applications for Underwater Pressure Sensors and Tactile Sensors
- Category: MEMS & BioMEMS
- Tags: jeffrey lang, mun ee woo
Microelectromechanical system (MEMS) pressure sensor arrays are gaining attention in the field of underwater navigation because they are seen as alternatives to current sonar and vision-based systems that fail to navigate unmanned undersea vehicles (UUVs) in dark, unsteady, and cluttered environments. Other advantages of MEMS pressure sensor arrays include lower power consumption and the fact that their passive nature makes them covert. This work focuses on the development of a flexible pressure sensor array for UUVs, where the sensor array is inspired by the ability of fish to form three-dimensional maps of their surroundings[1],[2]. Fish are able to decipher various pressure waves from their surroundings using the array of pressure sensors in their lateral line sensory organs that can detect minute pressure differences. Similarly, by measuring pressure variations using an engineered pressure-sensor array on the surface of an UUV, this project aims to aid UUVs in the identification and location of obstacles for navigation. The active material of the pressure sensor array is a porous polydimethylsiloxane (PDMS)-carbon black composite made out of a sugar sacrificial scaffold that shows great promise for satisfying the proposed applications. The proposed device structure is flexible, easily fabricated, cost efficient, and capable of being implemented on a large-area and curved UUV surface. Although hysteresis occurs during the electromechanical test, the piezoresistivity of this porous PDMS-carbon black composite is reversible and reproducible. Compared to its non-porous counterpart[3], this porous composite shows a six-times increase in piezoresistivity and a greatly reduced Young’s Modulus. When tested underwater, this porous composite was able to differentiate water waves that had a frequency of 1 Hz and 2 Hz, which is promising for its underwater application. This porous composite was also extended to the application of tactile sensors using a different device architecture, which showed excellent response under mechanical testing.
-
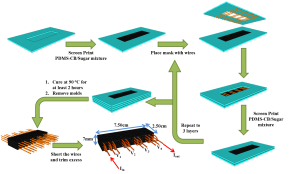
- Fabrication flow of underwater pressure sensor array.
-
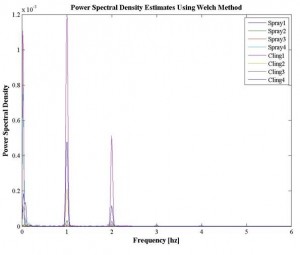
- Frequency detected by the underwater sensor array when a wave at the frequency of 1 Hz and 2 Hz was driven in the tow tank.
- J. C. Montgomery, S. Coombs, and C. F. Baker, “The mechanosensory lateral line system of the hypogean form of Astyanaxfasciatus,” Environmental Biology of Fishes, vol. 62, pp. 87-96, 2001. [↩]
- C. von Campenhausen, I. Riess, and R. Weissert, “Detection of stationary objects by the blind cave fish Anoptichthys jordani (Characidae),” Journal of Computational Physiology A, vol. 143, pp. 369-374, 1981. [↩]
- F. M. Yaul, V. Bulovic, and J. H. Lang, “A flexible underwater pressure sensor array using a conductive elastomer strain gauge,” Proceedings: IEEE MEMS Workshop, pp. 500-503, 2012. [↩]