An Efficient Framework for Passive Compact Dynamical Modeling of Multiport Linear Systems
- Category: Circuits & Systems
- Tags: luca daniel, zohaib mahmood
Automatic generation of accurate, compact, and passive dynamical models for multiport linear structures such as interconnects is a crucial part of the overall design procedure for complex circuits. First, frequency response samples for multiport linear structures are collected from either an electromagnetic field solver or physical measurements. Second, a compact model is developed that can be incorporated into a circuit simulator for time-domain simulations of a larger system also containing nonlinear devices. For these compact models, even a small violation of any basic property of the structure, such as passivity, can cause large errors in the response of the overall system, and the results can become completely nonphysical. It is, therefore, essential to preserve basic system properties during the model identification. To model multiport structures from given frequency response samples, the approaches based on convex optimization [1] are very expensive and quickly exhaust available computational resources such as memory. These approaches can be used to model only structures having a much smaller number of ports. Other techniques identify a stable, but non-passive, model, and then perturb the model to make it passive [2] . However, such approaches suffer from limitations if the initial non-passive model has significant passivity violations.
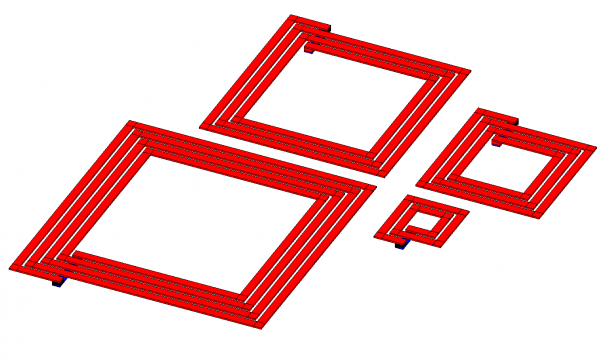
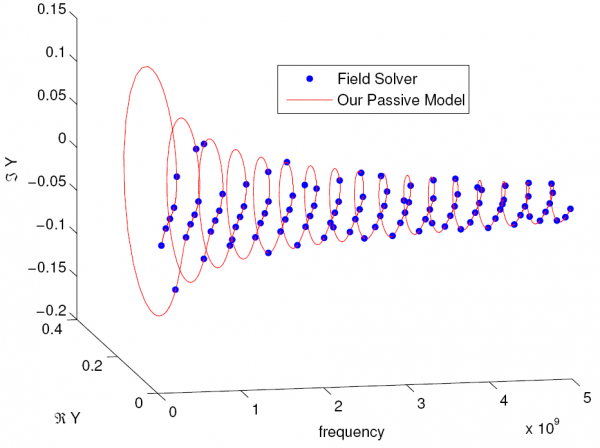
In this work, we are developing an efficient modeling framework that will automatically generate accurate, compact, and passive dynamical models for multiport linear systems. Given measured transfer function samples, we identify a rational transfer function model that minimizes the mismatch at the given frequencies. These dynamical models can be interfaced with commercial circuit simulators for time-domain simulations of a larger interconnected system. To guarantee the stability of the overall simulation, we ensure the passivity of our generated models by enforcing semidefinite constraints during the fitting process as proposed in [3] [4] . Figure 1 shows the layout of coupled RF inductors, which is one of the structures we used for testing our algorithm. Figure 2 compares the output of our identified model with the given data for a four-port structure. Furthermore, for the same model order, we get orders-of-magnitude improvement in terms of both speed and memory compared to [1] .
-
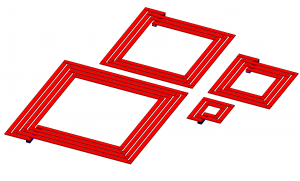
- Figure 1: Layout of coupled RF inductors.
-
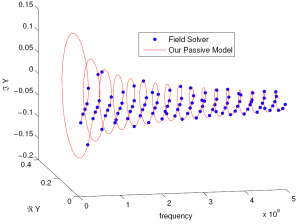
- Figure 2: [4-port structure] Blue dots indicate the given Y11 frequency response samples. The red solid line is the Y11 from our identified model.
- C. P. Coelho, J. R. Phillips, and L. M. Silveira, “A convex programming approach to positive real rational approximation,” in Proc. of the IEEE/ACM International Conference on Computer-Aided Design, San Jose, CA, Nov. 2001, pp. 245–251. [↩] [↩]
- S. Grivet-Talocia, “Passivity enforcement via perturbation of Hamiltonian matrices,” IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 51, no. 91755–1769, Sept. 2004. [↩]
- Z. Mahmood and L. Daniel, “Circuit synthesizable guaranteed passive modeling for multiport structures,” in Proc. of Behavioral Modeling and Simulation Conference (BMAS), Sept. 2010. [↩]
- Z. Mahmood, R. Suaya and L. Daniel, “An efficient framework for passive compact dynamical modeling of multiport linear systems,” in Proc. of Design, Automation and Test in Europe (DATE), Mar. 2012. [↩]