MEMS Pressure-sensor Arrays for Passive Underwater Navigation
- Category: MEMS & BioMEMS
- Tags: Jeffrey Lang, Stephen Hou
A novel sensing technology for unmanned undersea vehicles (UUVs) is under development. The project is inspired by the lateral line sensory organ in fish, which enables some species to form three-dimensional maps of their surroundings [1] [2] . The canal subsystem of the organ can be described as an array of pressure-sensors [3] . The lateral line allows fish to perform a variety of actions, from tracking prey [4] to recognizing nearby objects [2] [5] . Similarly, by measuring pressure variations on a vehicle surface, an engineered pressure-sensor array allows the identification and location of obstacles for navigation. Several strain-gauge-based approaches to the sensing element are being tested. The two types presented here are silicon- and polymer-based technologies.
Both sensor designs share the following features. The array consists of thin diaphragms. Each sensor has an empty cavity behind the membrane connected via a common backplane to the others. A set of strain gauge resistors on the diaphragms responds to pressure changes. When the sensor is placed in a Wheatstone bridge, the resulting output voltage can be used to determine the change in resistance in the strain gauges and thus the pressure difference between the two sides of the diaphragm. The two technologies differ chiefly in how strain is measured. In the silicon-based approach, the shape of the resistor is altered slightly by strain. In the polymer-based approach, the distances between conducting particles embedded in the material adjusts as strain is applied.
The amplified voltage output bridges with strain-gauge resistors on diaphragms of various sizes as was measured as a function of applied pressure. Generally, larger diaphragms are more stable and more sensitive, whereas small diaphragms maintain linearity over a wider range and are more physically robust. The deflections of the centers of silicon diaphragms are measured as functions of applied pressure. Although larger diaphragms exhibit non-linear behavior, there are no hysteretic effects, thus enabling their usage for static and dynamic pressure sensing.
For the conductive polymer strain-gauge patterned onto a PDMS membrane, the resistances of the strain gauges are measured against the segment length. The resulting linear fit demonstrates consistency of resistivity across the patterned structure. Finally, observing output voltage in response to dynamic pressure applied with a syringe connected to the sensor indicates a bandwidth fast enough for underwater sensing.
-
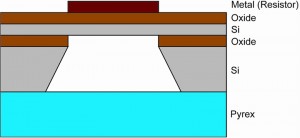
- Figure 1: Silicon-based devices.

-
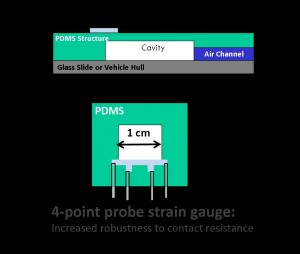
- Figure 2: Polymer-based devices.

- J. C. Montgomery, S. Coombs, and C. F. Baker, “The mechanosensory lateral line system of the hypogean form of Astyanaxfasciatus,” Environmental Biology of Fishes, vol. 62, pp. 87-96, 2001. [↩]
- C. von Campenhausen, I. Riess, and R. Weissert, “Detection of stationary objects by the blind cave fish Anoptichthys jordani (Characidae),” Journal of Computational Physiology A, vol. 143, pp. 369-374, 1981. [↩] [↩]
- S. Coombs, “Smart skins: Information processing by lateral line flow sensors,” Autonomous Robots, vol. 11, pp. 255-261, 2001. [↩]
- K. Pohlmann, J. Atema, and T. Breithaupt, “The importance of the lateral line in nocturnal predation of piscivorous catfish,” Journal of Experimental Biology, vol. 207, pp. 2971-2978, 2004. [↩]
- T.J. Pitcher, B. L. Partridge, and C. S. Wardle, “A blind fish can school,” Science, vol. 194, pp. 963-965, 1976 [↩]