Flexible Multi-site Electrodes for Moth Flight Control
- Category: MEMS & BioMEMS
- Tags: Joel Voldman, Wei Mong Tsang
Significant interest exists in creating insect-based Micro-Air-Vehicles (MAVs) [1] [2] [3] that would combine advantageous features of insects—small size, effective energy storage, navigation ability—with the benefits of MEMS and electronics—sensing, actuation and information processing. The key part of the insect-based MAVs is the multi-site electrode, which interfaces with the nervous system of the insect to bias the insect’s flight path by controlling insect’s abdominal motions.
In this work, we have developed a flexible multi-site electrode (FME) for insect flight control that directly interfaces with the animal’s central nervous system as shown in Figure 1b. The FMEs are made of two layers of polyimide with gold sandwiched in-between in a split-ring geometry using standard MEMS processing [3] . The FMEs have a novel split-ring design that incorporates the anatomical bi-cylinder structure of the nerve cord of the Moth Manduca Sexta (Figure 1b) and allows for an efficient surgical process for implantation (Figure 1d). Additionally, we have integrated carbon nanotube (CNT)-Au nanocomposites into the FMEs to enhance the charge injection capability of the electrode.
To quantify the performance of the FME, we have developed a custom stimulation and measurement system that allows computer-controlled stimulation and automated image analysis of the resulting abdominal motion (Figure 2a). We measured the magnitude (r) and direction (q) of the abdominal movement by the position of the red dot on the abdomen tip of the moths (Figure 2 b) versus the stimulations signal delivered at various magnitude and across various site pair. Moreover, we measured the voltage and current across pairs of stimulation sites during stimulation signal delivery (Figure 2c); hence, we could estimate the power consumption and injection charge density for the FME stimulations. Finally, we have integrated the FMEs into a wireless system (Figure 1a). In the flight control experiment, we can force a freely flying animal to perform turning motions via the FME stimulations.
-
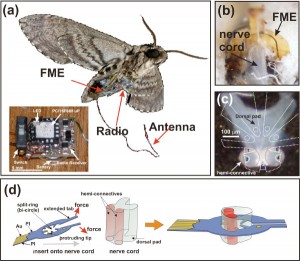
- Figure 1: (a) Illustration of i-MAVs. (b) Image of dissected moth showing the interface between the FME and nerve cord. (c) Image of a cross section of the nerve cord of the adult moth overlaid with scaled schematized drawings of the split-ring of the FME. (d) Schematic of the FME insertion process, showing the split-ring can be opened to fit around the nerve cord.

-
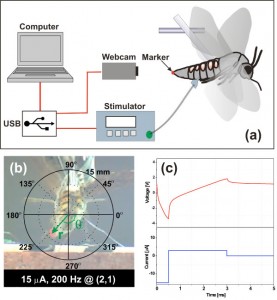
- Figure 2: (a) Schematic of the tethered stimulation system. (b) Image showing the abdominal movement of the moth following the FME stimulation. (c) The voltage and current across the site pair during stimulation signal delivery.

- A. Bozkurt, F. Gilmour, and A. Lal, “Balloon-assisted flight of radio-controlled insect biobots,” IEEE Transactions on Biomedical Engineering, vol. 56, pp. 2304-2307, Sept. 2009. [↩]
- H. Sato, C. W, Berry, Y. Peeri, E. Baghoomian, B. E. Casey, G. Lavella, J. M. VandenBrooks, J. F. Harrison, and M. M. Maharbiz, “Remote radio control of insect flight,” Frontiers in Integrative Neuroscience, vol 3, pp. 1-11, Oct. 2009. [↩]
- W. M. Tsang, A. Stone, Z. Aldworth, D. Otten, T. Akinwande, T. Daniel, J. G. Hildebrand, R. Levine, and J. Voldman, “Remote control of a cyborg moth using carbon nanotube-enhanced flexible neuroprosthetic probe,” Proc. IEEE MEMS2010, pp. 39-42. [↩] [↩]