Compact Modeling of NON-LINEAR Analog Circuits Using System Identification via Semidefinite Programming and Incremental Stability Certification
- Category: Circuits & Systems
- Tags: Bradley Bond, Luca Daniel, Zohaib Mahmood
During recent years, researchers of the Electronic Design Automation community have made a great effort to develop new techniques for automatically generating accurate compact models of NON-LINEAR system blocks. The majority of the existing methods for creating stable reduced models of nonlinear systems, such as [1] , require knowledge of the internal structure of the system, as well as access to the exact model formulation for the original system. Unfortunately, this information may not be easily available if a designer is using a commercial design tool, or may not even exist if the system to be modeled is a physical fabricated device.
As an alternative approach to nonlinear model reduction, we have proposed a system-identification procedure. This procedure requires only data available from simulation or measurement of the original system, such as input-output data pairs. By enforcing incremental stability, as shown in [2] , it is possible to formulate a semi-definite optimization problem whose solution is a stable nonlinear model that optimally matches the given data pairs from the original system. In addition, the proposed optimization formulation, explained in detail in [3] , allows users to specify completely the complexity of the identified reduced model through the choice of both model order and nonlinear function complexity.
Applications for the proposed modeling technique include analog circuit building blocks such as operational amplifiers and power amplifiers, MEMS devices, and individual circuit elements such as transistors. The resulting compact models may then be used in a higher-level design optimization process of a larger system. One such example of an analog circuit block is the low-noise amplifier shown in Figure 1; it contains both nonlinear and parasitic elements. For this example, input-output training data was generated from a commercial circuit-simulator and used to identify a compact nonlinear model. The output responses of the original system and the identified model are compared in Figure 2.
-
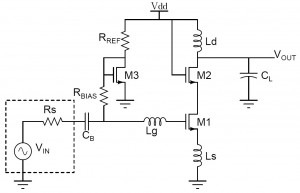
- Figure 1: Application example: Low-noise amplifier designed in CMOS technology.

-
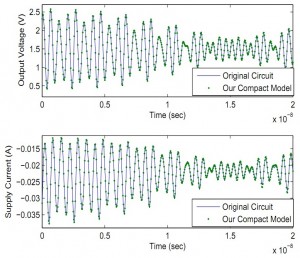
- Figure 2: Time domain outputs, over a small portion of the period, of the original LNA circuit from a commercial circuit simulator (solid line) and the stable nonlinear compact model identified by our procedure (dots) in response to an input signal different from the training signals.

- B. Bond and L. Daniel, “Stabilizing schemes for piecewise-linear reduced order models via projection and weighting functions,” in Proc. IEEE Conference on Computer-Aided Design, San Jose, CA, Nov. 2007, pp. 860-867. [↩]
- A. Megretski, “Convex optimization in robust identification of nonlinear feedback,” in Proc. IEEE Conference on Decision and Control, Cancun, Mexico, Dec. 2008, pp. 1370-1374. [↩]
- B. Bond, Z. Mahmood, Y. Li, R. Sredojevic, A. Megretski, V. Stojanovic, Y. Avniel, and L. Daniel, “Compact Modeling of Nonlinear Analog Circuits Using System Identification via Semidefinite Programming and Incremental Stability Certification,” Computer-Aided Design of Integrated Circuits and Systems, IEEE Transactions on , vol.29, no.8, pp.1149-1162, Aug. 2010. [↩]